

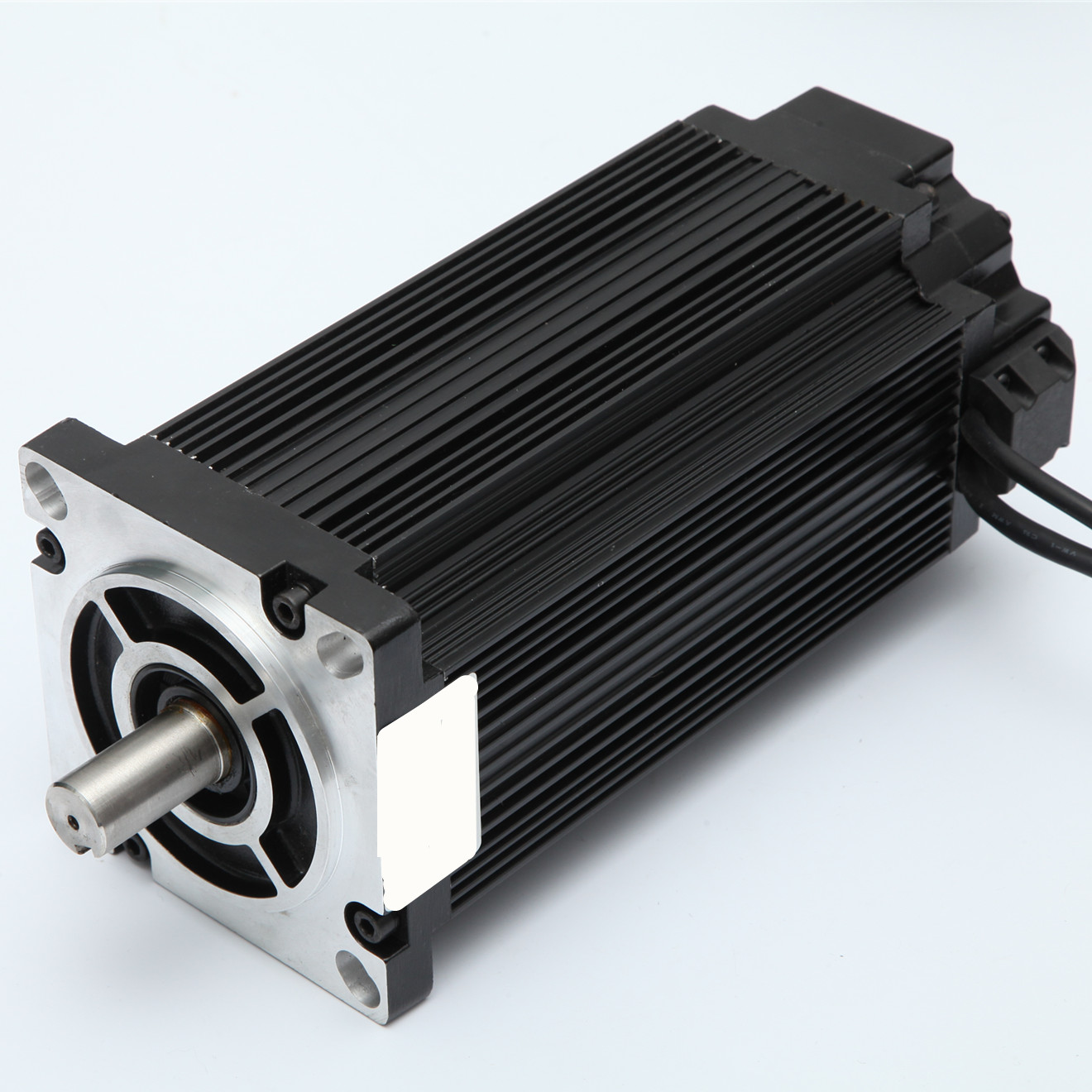
Affichage numérique haute tension 220V Nema42, moteur pas à pas en boucle fermée 12nm
Série NEMA42 Easy Servo (série NEMA42 en boucle fermée)
Paramètres électriques du moteur :
| Mode | Angle de pas | Courant (A) | Résistance (Ω ± 10 %) | Inductance (mH±20%) | Couple de maintien (Nm) | Longueur du moteur (mm) | Encodeur Résolution (PPR) | Pilote applicable |
| 110HCE12N-B39 | 1,2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1,2° | 4.2 | 1,88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
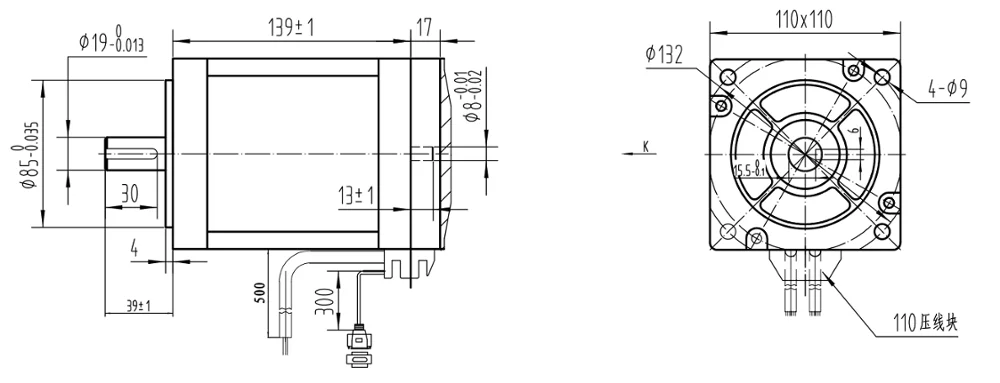
Dimension du moteur : mm
Courbe couple/fréquence
Pilote 3HSS2260
Caractéristiques
Technologie de contrôle DSP 1, 32 bits et vecteur en boucle fermée
2, sans perdre de pas, haute précision de position
3, améliorer le couple de sortie du moteur et la vitesse de travail
4, technologie de contrôle de courant variable, limite l'augmentation de la température du moteur
5, s'adapter à diverses conditions de charge mécanique (y compris les poulies à faible rigidité), non
besoin d'ajuster le paramètre de gain
6, déplacement fluide et fiable, faibles vibrations, grande amélioration de l'accélération et
ralentir
7, la capacité de statique à vitesse nulle sans vibration
8, s'adapter au servomoteur hybride triphasé 86 (NEMA34) et 110 (NEMA 42)
9, fréquence maximale d'impulsion de pas 200 KHZ
10, Micro pas 400-60000 impulsion/tour
11, plage de tension AC150-240V
12, protection contre les surintensités, les surtensions et les surpositions
13, affichage à six tubes numériques, facile à définir les paramètres et à surveiller le fonctionnement du moteur
État
Sélection micropas :
| Code | Définition | Gamme | Valeur par défaut | Remarque |
| PA0 | Numéro de version | 501 | Interdit de modifier | |
| PA1 | Sélection du mode de contrôle | 0~2 | 0 | |
| PA2 | Sélection du type de moteur | 0~2 | 0 | |
| PA3 | Affichage de mise sous tension | 0~7 | 0 | |
| PA4 | Boucle de courant Kp | 0~1000 | 200 | Interdit de modifier |
| PA5 | Boucle de courant Ki | 0~1000 | 300 | Interdit de modifier |
| PA6 | Boucle de position Kp | 0~1000 | 300 | |
| PA7 | Réglage des micro-étapes | 400~60000 | 4000 | |
| PA8 | Résolution de l'encodeur (1000) | 4000 | Interdit de modifier | |
| PA9 | Résolution de l'encodeur (1000) | 40~30000 | 1000 | |
| PA10 | Courant de maintien | 10~100 | 40 | |
| PA11 | Courant en boucle fermée | 10~100 | 100 | |
| PA12 | Réservation | |||
| PA13 | Réservation | |||
| PA14 | Activer le niveau | 0/1 | 0 | |
| PA15 | Niveau d'alarme | 0/1 | 0 | |
| PA16 | Sélection du mode d'impulsion | 0/1 | 0 | |
| PA17 | Front d'impulsion | 0/1 | 0 | |
| PA18 | Sens de rotation du moteur | 0/1 | 0 | |
| PA19 | Vitesse de jogging | 1~200 | 60 | |
| PA20 | Section Mode PENDANT | 0/1 | 0 | |
| PA21 | Niveau PENDANT | 0/1 | 0 |
Dimension du pilote (mm):
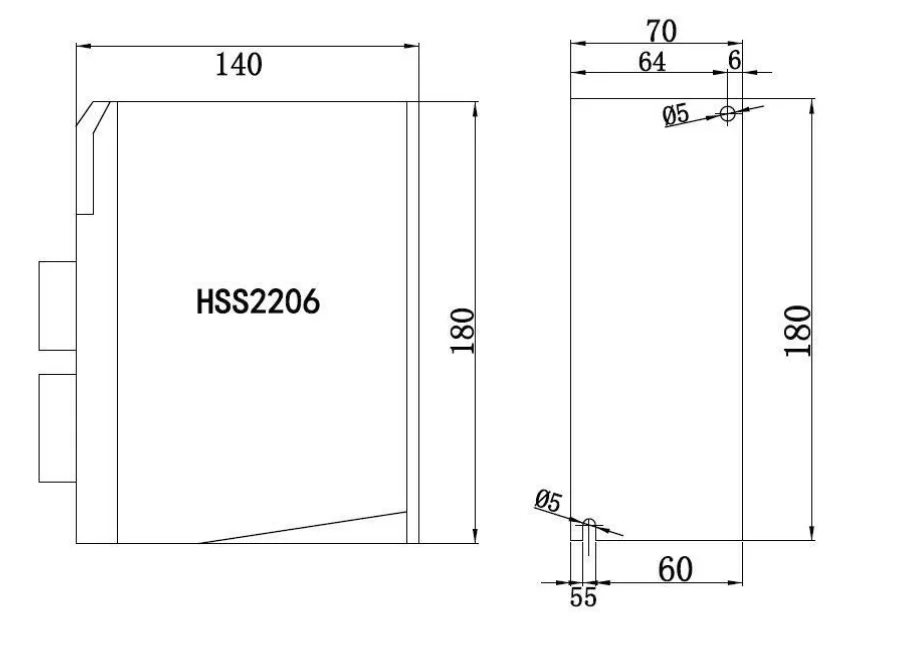
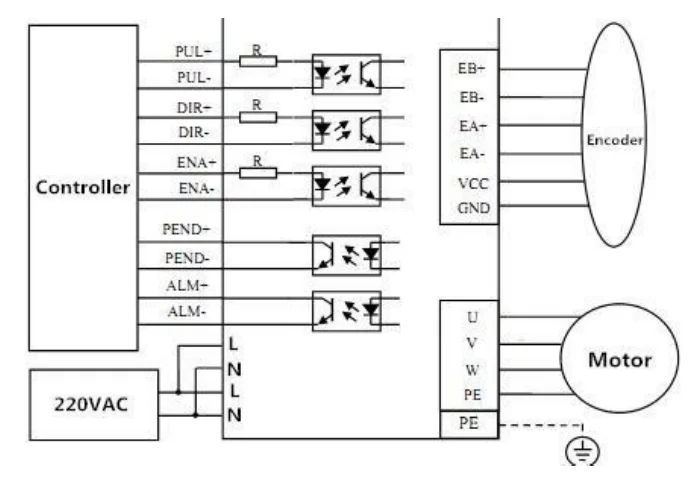
Schéma de câblage :



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
